
一款强大的无人机操作及综合管理的移动端应用程序

UAV:无人机系统
GCS:地面站系统
UAV Router:无人机路由
GSC Router:地面站路由
FC:飞控
LOAD:载荷
RC:数据链路整合单元
GRC:遥控模块
GLRC:载荷测控模块
MP:任务规划模块
翼飞智能拥有完整的飞控底软开发能力、数据链路开发能力、嵌软开发能力。可依据客户的需求,对飞控做顶层封装、对控制及链路做二次开发、对自定义载荷功能开发、通信数据整合开发等无人机相关定制研发。
为快速高效解决客户对无人机的自定义设置,我司自主研发了翼飞智能开发者平台,主要包含自定义载荷与自定义地面站两部分。
自定义载荷: 方便用户快速搭建载荷数据传输平台,简化了客户数据对接流程,方便统一进行载荷类型管理。
自定义地面站:指令化形式操控无人机,以实现快速二次开发。
载荷类型编号限定:私有范围1000-9999,公有范围0 – 999和10000-99999。
UAV Router:无人机路由
GCS Router:地面站路由
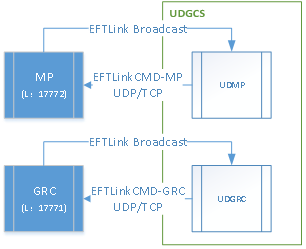
UDGCS:用户自定义地面站系统
EFTLink Broadcast:EFTLink的广播数据
L:17771:表示当前软件监听端口为17771
T:17770:表示软件数据发送的目标端口为17770
EFTLink_LOAD_CONVERTER:EFTLink规约转换器(硬),以下简称SLC
EFTLink_GLRC_CONVERTER:EFTLink规约转换器(软),以下简称SGC
LOAD:载荷模块
GLRC:载荷测控模块

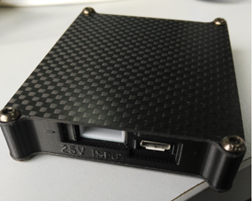
规约转换器(硬)
补充说明:xxxxxxxxxxxx
25V INPUT:供电接口
RC:接RC板
MicroUSB:SLC配置接口
PAYLOAD:载荷接口

规约转换器(软)
参考5.3.2UDGLRC通讯配置

配置
配置载荷数据与载荷测控数据的通道信息,详细说明见附件《附件4:EFTLink开发者平台使用示例》。
注意事项:
通道定义上从0开始,最多支持32个通道。
变化数据发送频率推荐为10Hz,最大25Hz。
通道0与通道1固定,分别为载荷类型与载荷唯一编码。

说明
自定义载荷,将载荷数据打包为EFTLinkCMD-Load指令进行发送。
参考
《EFTLinkCMD-LOAD&GLRC.docx》
《附件1(EFTLinkCMD-ENUM).docx》
UDLOAD实例
1) 运行UDLOAD_UDGLRC.exe载荷测控客户端:



UDMP
功能说明
用户自定义任务规划模块,与MP通过TCP或UDP进行通讯,通讯方式可在MP中进行配置,MP默认监听端口为17772,用户可通过EFTLinkCMD-MP(见附件)指令与MP模块进行数据交互,实现自定义任务规划模块。
通讯配置
1) UDGRC与GRC通讯方式设置
2) GRC监听端口
GRC监听端口默认为17771,如该端口被占用或无法使用,可在GCS配置文件中修改。
配置文件目录如下:GCS安装根目录 // config.xml ,修改节点“L_UDGRCPort”即可;
注意事项
UDGRC控制通道为16个,通道值与无人机飞行相关,在设置通道值时需谨慎操作。
通过UDGRC设置的通道值只会维持3秒,如需一直改变该通道的值,需每隔1秒重新发送设置该通道值的指令。
UDGRC实例
1) UDGRC与UDMP除数据传输端口与指令不同外,其他实现方式一致,参考UDMP实例,指令文档参考《EFTLinkCMD-GRC.docx》。
UDGLRC
功能说明
用户自定义载荷测控模块,与SGC进行通讯,通讯指令参考文档EFTLinkCMD-LOAD&GLRC,可在SGC中配置通讯方式:TCP/UDP/COM,以实现自定义载荷测控模块。
天鹰M6-160H是我司专门为了科研定制需求而研发的一款六旋翼无人机,1m6轴距,机臂可拆卸,组装时间不超过3分钟。且飞机配套数据链路全由我司研发人员自行研制,可根据相关科研定制需求自由进行更改和调试。
无人机系统架构
平台系统架构图
MP:任务规划模块
GRC:遥控模块
UDLOAD:用户自定义载荷
UDGLRC:用户自定义载荷测控模块
UDMP:用户自定义任务规划模块
UDGRC:用户自定义遥控模块
EFT_DAnalysis:数据分析软件
EFT_LinkConfig:载荷配置工具软件
EFTLinkCfg.xml:载荷配置文件,保存载荷通道和载荷遥控通道信息
规约转换器包含软硬两部分,即SLC与SGC,SLC直连自定义载荷与无人机系统,将自定义载荷指令数据与EFTLink数据进行相互转换。
规约转换器
UDLOAD开发说明
2) 连接SLC,波特率为115200:
3) 使用快捷指令进行模拟载荷数据发送:
点击需要发送的指令,修改后进行发送,如下EFT^MCH=[n,m],需去掉’[]’符号,并更换n与m为具体的值,n为通道编号(从0开始),m为通道值,通道值需满足规约转换器配置的通道值所占位数。指令发送成功回复:EFT^CL>OK,失败回复:EFT^CL>Error= [ErrorCode],ErrorCode的值见《附件2:EFTLinkCMD-ENUM》。
4) 遥信数据:
EFT^RI=xxxx:遥信数据,透传模式。
UDGCS开发说明
通讯配置
1) UDMP与MP通讯方式设置
2) MP监听端口
MP监听端口默认为17772,如该端口被占用或无法使用,可在GCS配置文件中修改默认端口。
配置文件目录如下:GCS安装根目录 // config.xml ,修改节点“ L_UDMPPort”即可;

3) 扩展:数据广播
在需要更全面的二次开发时,可通过配置GCS数据广播端口,解析广播数据(EFTLink协议)。

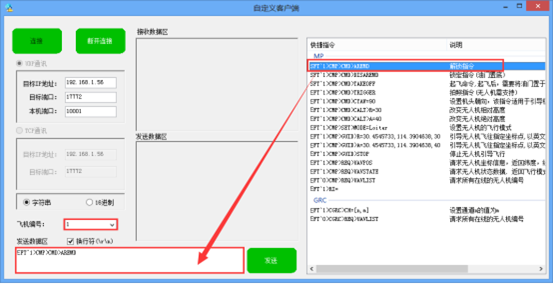
UDMP实例
1) 运行UDMP_UDGRC.exe;

2) 配置通讯端口

3) 连接MP
点击连接按钮连接GCS MP模块,开始进行数据通讯。

4) 快捷指令
选择需要控制的无人机编号,点击右侧MP组的快捷指令,修改后进行发送。发送成功回复:EFT^[SysID]>MMP>OK,失败回复:EFT^[SysID]>MMP>ERROR=[ErrorCode],其中符号‘[ ]’包含的数据根据实际数值进行替换,ErrorCode的值见《附件2:EFTLinkCMD-ENUM》,指令详细解释参考文档《EFTLinkCMD-MP.docx》。
UDGRC
功能说明
用户自定义遥控模块,与GRC通过TCP或UDP进行通讯,通讯方式可在MP中进行配置,GRC监听端口默认为17771。用户可通过EFTLinkCMD-GRC(见附件)指令与GRC模块进行数据交互,实现自定义遥控模块。
通道默认功能说明:



通讯配置
1) GCS配置
开启地面站数据广播端口,地面站在接收到数据后将向对应的端口广播数据。

2) SGC配置
选择地面站配置的数据广播端口,用于接收地面站载荷数据。

开启监听端口,用于接收UDGLRC的载荷控制指令数据。

UDGLRC实例
UDGLRC与SGC进行通讯,通讯方式可在SGC中进行配置,本平台支持无人机蜂群系统,所以在指令发送时需要区分无人机编号,载荷类型编号,具体参考EFTLinkCMD-GLRC指令文档。
1) 运行UDLOAD_UDGLRC.exe载荷测控客户端:

2) 连接SGC:
根据在SGC中配置的通讯方式进行连接。

3) 使用快捷指令进行模拟载荷数据发送:
点击需要发送的指令,修改后进行发送,如下EFT^1>CGLRC>CCH=[LoadTypeID|n,m|n,m]。
需去掉’[]’符号,并更换n与m为具体的值,n为通道编号(从0开始),m为通道值,通道值需满足规约转换器配置的通道值所占位数。
指令发送成功回复:EFT^CGLRC>OK,失败回复:EFT^CGLRC>Error= [ErrorCode],ErrorCode的值见《附件2:EFTLinkCMD-ENUM》。


研发配套无人机
翼飞智能支持科研定制无人机项目
翼飞智能科技(武汉)有限公司
关注我们

