微信客服
微信公众号
多维跨域,相得益彰 空地跨域协同、人机共...
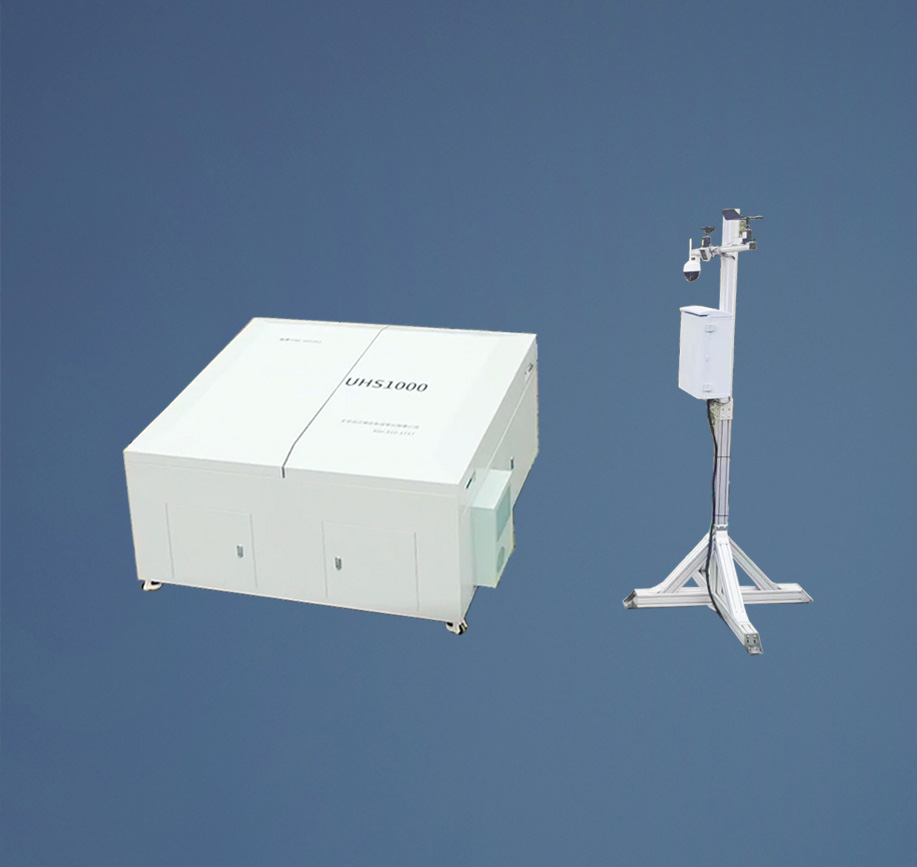
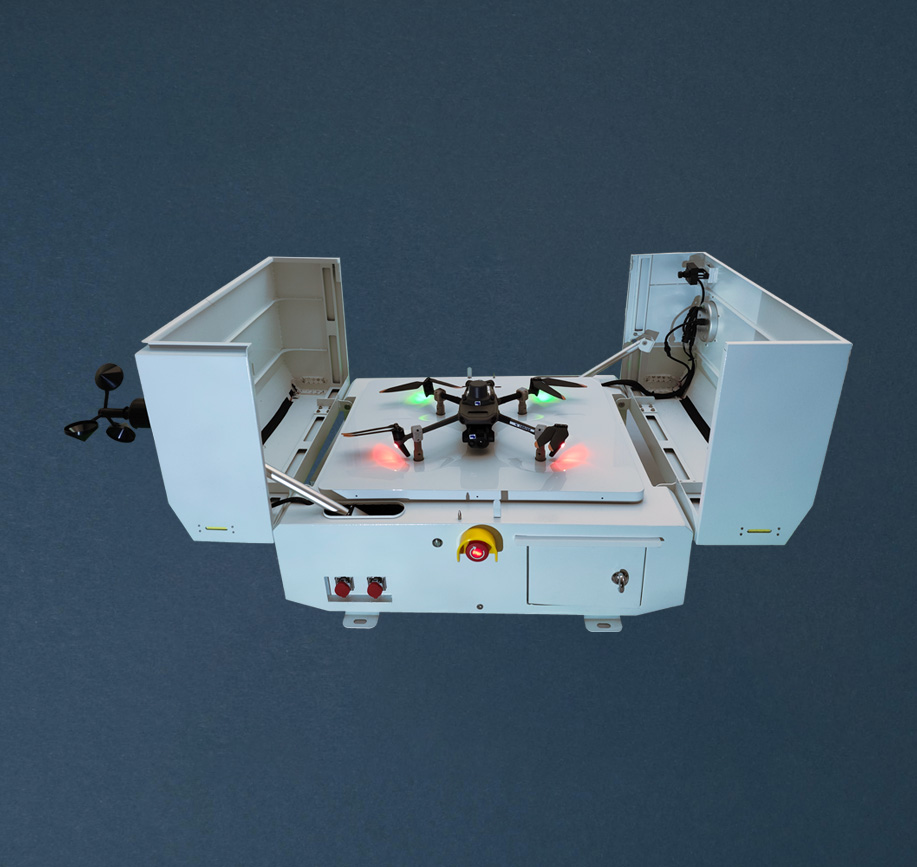
UHS智能停车
UHS 400自动机场
黑鸟S30基本参数 机型 垂直起降固定翼...
海鸥S23无人机 您的浏览器不支持视频标...
项目 参数 机型 D80双视场球型吊舱 ...
项目 参数 机型 D80Pro 双视场球...
应用概述 为积极践行水利改革发展总基调和“安全、实用”水利网...
应用概述 通过无人机系统提高道路交通运输行业运行监测能力,提...
应用概述 无人机遥感系统具有成本低、安全性高、机动性强、精度...
应用概述 数字地球和智能地球提出了高效应用资源和环境的口号。...
应用概述 在人员密集、场景复杂的安全监控领域的应用,纵横CW...
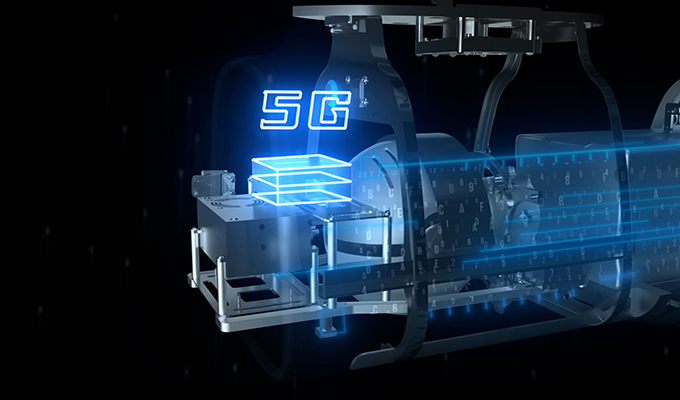
5G 网联无人机 5G联网无人机,通过5G蜂窝网络取代无人机...
应用概述 警用无人机空中平台搭载的图像、红外、激光、气体等多...
应用概述 垂直起降无人机适合高效率、高精度、大面积航测项目,...
应用概述 电力工业是国民经济的重要组成部分之一。它承担着将自...
获取最前沿的无人机资讯
重载不再难,大载重无人机为工业运输赋能 ...
随着无人机技术的不断进步,大载重无人机正...
在科技迅猛发展的今天,无人机技术正以前所...
清晨,山区的电力工程师启动了一架多旋翼无...
在数字化浪潮与自动化趋势的推动下,...
翼飞团队:用专业与担当征服高原无人区 翼...
在当今科技迅猛发展的时代,无人机(UAV...
在数字化转型与智能化升级的大潮中,工业级...
在信息化与智能化飞速发展的今天,无人机作...
在无人机技术迅猛发展的今天,找到一家既懂...
在智能制造与高科技飞速发展的今天,无人机...
随着“无人化配送”、“低空经济”、“即时...